

2.2.4.- Variadores de continua reversibles
Se entiende por
variador reversible aquel sistema que permite la inversión rápida del sentido
de giro del motor al que controla.
En los casos en
los que no sea necesario que la inversión del sentido de giro sea rápida, es
suficiente utilizar un variador no reversible.
Par conseguir
el cambio del sentido de giro primeramente debe frenarse el motor,
invirtiéndose, una vez parado, el sentido de giro.
Dentro de este
grupo de variadores las posibilidades más frecuentemente empleadas son:
- Montaje con inversión de la corriente del inductor.
- Montaje con inversión de la corriente del inducido.
- Montaje reversible "antiparalelo".
2.2.4.1.- Variadores de continua reversibles
(Ciclo de trabajo)

Figura
15: Cuadrante de funcionamiento de un motor
El ciclo de
trabajo completo consiste en pasar de un cuadrante a otro en el orden
I-II-III-IV:
- Arranque en sentido directo + una fase de trabajo a régimen nominal como motor en sentido directo.
- Después de esta fase de trabajo, frenado (paso de I a II).
- Cuando la velocidad se anula, se invierte el sentido de giro (paso de I a II).
- Después de una fase de trabajo en sentido inverso, paso a IV, para parar el motor y pasar a I, a fin de completar el ciclo de trabajo.
2.2.4.2.- Variadores de continua reversibles
(Inversión de la corriente del inducido)
El inducido se
alimenta con un rectificador totalmente controlado, obteniéndose la inversión
del par cambiando de sentido la corriente en el inducido, Imotor, con la ayuda
de un contactor bipolar.
La posición 1
del contactor corresponde a una corriente Imotor positiva y al trabajo en los
cuadrantes I y II.
La posición 2
del contactor corresponde a una corriente -Imotor y al trabajo en los cuadrante
II y III.

Figura
16
2.2.4.2.1.- Funcionamiento y características
La inversión
del contactor sólo debe hacerse cuando la intensidad sea nula. El tiempo muerto
de inversión del par corresponde al tiempo de detección de la intensidad nula
más el tiempo de respuesta del sistema mecánico, y suelo variar entre 0,1 y 0,3
segundos.
Con este
procedimiento se consigue la inversión del par en un tiempo menor al que se
conseguiría invirtiendo el campo de la excitación, pero se ponen en grupo
dispositivos mecánicos, lo que da menor fiabilidad al sistema, requiriendo,
además, un mayor mantenimiento, sobre todo si el número de inversiones es
elevado.
2.2.4.3.- Variadores de continua reversibles
(Inversión de la corriente del inductor)
El inducido se
alimenta con un sólo rectificador, formando únicamente a base de tiristores
(puente de cuatro tiristores para una red monofásica o puente de seis
tiristores para un sistema trifásico, por ejemplo). En esta situación, la inversión
del par se realiza invirtiendo la corriente del inductor.
Normalmente se
hace con dos pequeños rectificadores montados en antiparalelo, alimentando al
inductor en un sentido o en el otro.

Figura
17
2.2.4.3.1.- Funcionamiento
El
funcionamiento en los cuadrantes 1 y 4 estará asegurado para un sentido del
flujo de excitación, Φexc, mientras que en
los cuadrantes 2 y 3 se asegura para el sentido del flujo opuesto.
La inversión de
la intensidad de excitación Φexc debe realizarse
cuando la intensidad motor en el
inducido sea nula.
2.2.4.3.2.- Ventajas
e inconvenientes del montaje
Este montaje
tiene la ventaja de que la potencia a controlar es pequeña siendo una solución
sencilla y económica.
Sin embargo,
sólo es utilizable cuando se puedan aceptar tiempos muertos de inversión del
par bastante elevados (desde 0,5 segundos a algunos segundos), pues, debido a
la constante de tiempo de la excitación, la inversión de i no puede ser rápida.
2.2.4.4.- Variadores de continua reversibles
(Montajes en paralelo)
Para poder
efectuar inversiones muy rápidas (entre 5 y 20 ms) con un equipo totalmente
estático, deben utilizarse dos rectificaciones principales a tiristores. Ambos
rectificadores se montan en bornes del inducido y en antiparalelo.
Habitualmente
se emplean dos montajes:

Figura
18
2.2.4.4.1.-
Características de ambos montajes
El montaje
antiparalelo utiliza la misma alimentación para los dos rectificadores. La
alimentación puede ser la red o el secundario del transformador.
El montaje en
cruz utiliza la alimentación de los dos puntos con dos secundarios de un mismo
transformador.
En ambos casos,
el PUENTE 1 hace que sea posible el trabajo en los cuadrantes I y IV, mientras
que el PUENTE 2 lo hace posible para los cuadrantes II y III.

Figura
19: Esquema simplificado de un regulador reversible
en un
montaje antiparalelo
Leyenda de la
figura 19:
(1) Red
trifásica de corriente alterna, 220/380V; 50/60 Hz. Si el equipo es de otra
tensión, habría que colocar un transformador.
(2) Transformador-Rectificador
a tensión constante, con la que se alimenta el devanado inductor.
(3) Rectificador
de corriente con variación de sus valores en función de los consumos del motor,
devanado inducido.
(4) Rectificador
de corriente a base de tiristores. Según que se pilote un grupo u otro, el
signo positivo (+) estará en A o en BH, con lo que se conseguirá la inversión
de la corriente.
(5) Motor de
c.c. Devanado inducido.
(6) Dinamo
tacométrica accionada por el motor M.
(7) Devanado
inductor de excitación shunt.
(8) Modulador.
(9) Lógica de
mando de la conmutación.
(10) Regulador
de la corriente.
(11) Comparadores.
(12) Regulador
de la velocidad.
(13) Rampa de
aceleración.
(14) Potenciómetro
exterior de regulación y selección de la velocidad.
2.2.4.4.2.-
Equipos comerciales

Figura
20: Módulo de tiristores refrigerado por aire

Figura
21: Módulo de tiristores refrigerado por agua

Figura
22: Rectificador en montaje antiparalelo refrigerado por aire

Figura
23: Rectificador en montaje antiparalelo refrigerado por agua
3.- Variación de la velocidad con troceadores
3.1.- Generalidades
Los troceadores
o "choopers" permiten obtener una tensión continua variable a partir
de una tensión continua fija. Esta tensión variable que se obtiene alimentará
el inducido del motor, de tal forma que pueda regularse la velocidad del motor.
Los troceadores
son ampliamente utilizados en el campo de la tracción eléctrica en corriente
continua, por ejemplo sobre máquinas de tracción para ferrocarriles, tranvías,
trolebuses y vehículos a baterías (locomotoras de minas, carretillas, vehículos
eléctricos).

Figura
24
3.2.- Principio básico de funcionamiento
Un troceador en
un montaje que recorta una tensión continua fija dando lugar a una tensión de
salida variable en forma de "trozos" de la anterior.
Su
funcionamiento puede entenderse como un interruptor I que se cierra
regularmente a intervalos de tiempo iguales de duración T, durante un
tiempo δ .T (0 < δ < 1).

Figura
25
La carga es
periódicamente alimentada a una tensión Vtroc igual a la tensión continua de
entrada V durante el tiempo δ · T e igual a cero durante el tiempo T (1- δ ).
En el caso de
una carga inductiva, se coloca un diodo D en paralelo con el fin de suprimir
los intervalos de corriente nula que proporcionarán sobretensiones.

Figura
26
3.3.- Modos de control
Pueden usarse
tres tipos de control para controlar el proceso de troceado (o chopeado)

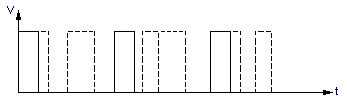
Figura
27: Frecuencia fija, tiempo de conducción variable.

Figura
28: Frecuencia variable.
Figura
29: Frecuencia y tiempo de conducción variables.
El troceador
con control tipo a) se denomina troceador con modulación por ancho de pulso o
PWM (Pulse Width Modulated) y es el más utilizado.
3.4.- Estructuras
En función de
los cuadrantes de trabajo del troceador pueden tenerse varias estructuras para
estos equipos:
3.4.1.- Troceador
unidireccional para el control de la aceleración
Permite la
variación de la tensión del inducido trabajando en el primer cuadrante,
regulando la transferencia de energía de la fuente hacia la máquina.

Figura
30
Leyenda de la figura
30:
(1) Conducción
discontinua
La Ii por el
inducido del motor se hace Φ durante un
intervalo de tiempo.

Figura
31
(2) Conducción
crítica
Aparece cuando
la corriente Ii por el inducido del motor se hace Φ en un punto.

Figura
32
3.4.2.- Troceador
unidireccional para el control del frenado regenerativo
Permite la
transferencia de energía del motor c.c. hacia la fuente durante el periodo de
frenado del motor, de forma que no hay disipación energética en resistencias,
como ocurre con otros métodos clásicos.

Figura
33
3.4.3.- Troceador
de 2 cuadrantes - reversible en corriente
Permite el
control del motor en su proceso de aceleración y realizar el frenado
regenerativo.

Figura
34
3.4.4.- Troceador
de 4 cuadrantes
Permite el
trabajo en los cuatro cuadrantes

Figura
35
POSTS RELACIONADOS:
Variadores de velocidad para motores de corriente alterna (Parte 1ª)
Variadores de velocidad para motores corriente alterna (y Parte 2ª)
No hay comentarios:
Publicar un comentario