

Principio
La duración de
estas conmutaciones de fuentes suele ser del orden de 150 ms.
El esquema más
frecuentemente recomendado es el de la figura 8.
En condiciones
normales de explotación, las dos semibarras se alimentan respectivamente de las
dos entradas, estando abierto el interruptor de acoplamiento.
El fallo de una
de las dos fuentes provoca la entrada del dispositivo de conmutación rápida que,
con ciertas condiciones, da dos órdenes diferentes:
- una de apertura al interruptor automático de la fuente que ha fallado.
El semi-juego de
barras correspondiente a la fuente con defecto queda por tanto alimentado.
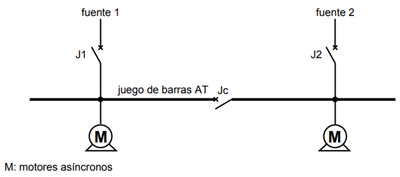
Figura 8
Campo de utilización
El caso típico es
el de instalaciones conectadas a dos fuentes AT que tienen un gran número de
motores asíncronos. Estos últimos, teniendo en cuenta las exigencias delas
máquinas arrastradas por estos motores, no deben quedar afectados ni por una
parada momentánea ni por una ralentización importante durante el período de
transferencia de la fuente principal hacia la fuente de reemplazo.
Esta aplicación
se ve especialmente en las industrias químicas y petroleras y generalizando, en
las industrias cuyos procesos de fabricación no toleran ninguna parada temporal
de ningún elemento de su cadena; también se aplica en las alimentaciones
auxiliares de las centrales térmicas.
Dificultades
La dificultad de
este tipo de conmutación reside principalmente en el hecho de que un motor
asíncrono trifásico, proporciona en sus bornes, durante el proceso de
ralentización cuando se ha cortado la red, una tensión trifásica alterna de
frecuencia y amplitud decrecientes inducida por el flujo remanente del motor.
La amplitud máxima
de esta tensión residual disminuye de una manera exponencial en función del
tiempo con una constante de tiempo que depende de:
·
la potencia
del motor,
·
el régimen
de conexiones estatóricas:
o estator
abierto, caso de un corte de la alimentación trifásica,
o estator en
cortocircuito, caso de un defecto trifásico en la alimentación.
Por el contrario,
la tensión nominal de alimentación del
motor no modifica mucho más el valor de la constante de tiempo.
La tabla 1 da
valores aproximados de las constantes de tiempo de extinción del flujo residual
para motores asíncronos de caja media.
La realimentación
rápida de motores en proceso de ralentización, sin precauciones especiales,
puede llevar a un acoplamiento en oposición de fases entre la fuente de reemplazo
y la red de utilización cuya tensión ha sido mantenida por los motores
asíncronos.
Solamente los
motores AT aislados con resina epoxy pueden permitir una realimentación en oposición
de fase. Sin embargo, hay que indicar que en este caso la corriente de pico es
igual aproximadamente a 3 veces la corriente de arranque del motor, o sea, de
15 a 20 In. Esto supone que el conjunto de la red de distribución se encuentra
en situación perturbada altamente peligrosa:
- caída de tensión y esfuerzos electrodinámicos muy importantes y repetitivos,
- disparo intempestivo de los interruptores automáticos de protección contra cortocircuitos francos,
- etc.
Por todos estos
motivos, no es posible realimentar de una manera ultrarrápida los motores sin
comparación del desfasaje de la tensión de la fuente con la tensión residual.
Por el contrario, con un dispositivo que compare el desfasaje de las tensiones
es posible conmutar de una manera ultrarrápida las fuentes. En el anexo puede
verse una descripción resumida de un comparador de fases.

Tabla 1: Constantes
de tiempo de extinción del flujo residual
para motores
asíncronos con caja mediana
Conmutación ultrarrápida con control de desfasaje
Las maniobras
posibles de una conmutación ultrarrápida están indicadas en los tres diagramas
de la figura 9.
Secuencia A:
La orden de conmutación
activa la apertura de un interruptor automático separador J1 ó J2; al final de
la apertura, el comparador de fase actúa y suministra, si las condiciones de conmutación
son favorables, una orden de enganche al interruptor automático de acoplamiento
Jc.
Secuencia B:
La orden de
conmutación ordena la apertura de un interruptor automático separador J1 ó
J2 y la conexión
del comparador de fases.
Cuando las
condiciones de conmutación son favorables, el comparador de fases da una orden
de conexión al interruptor automático de acoplamiento Jc.
Secuencia C:
La orden de
conmutación activa la actuación del comparador de fases. Cuando las condiciones
de conmutación son favorables, el comparador da simultáneamente una orden de conexión
al interruptor de acoplamiento Jc y una orden de desconexión a uno de los interruptores
separadores J1 ó J2.
Notas:
a) La secuencia C
se prefiere normalmente porque consigue una duración de conmutación más corta.
b) La elaboración
de la orden de conmutación puede implicar ciertas dificultades como son:
- detección de la ausencia real de tensión de alimentación normal en presencia de tensión residual,
- rapidez de actuación,
- etc. ...

Figura 9
Condiciones
que debe satisfacer una red para realizar un acoplamiento rápido
La primera condición que debe de
satisfacerse en el momento de realizarse efectivamente el acoplamiento se
expresa por la inecuación:

En general los motores pueden soportar un
acoplamiento en oposición de fase, después de la desconexión de la fuente
primera, cuando la medida de la tensión residual en sus bornes no sobrepasa el
valor Ur igual a 25% de Un.

Figura 10: Magnitudes eléctricas e
inecuación que condicionan
el funcionamiento de un acoplamiento rápido.
Esta primera condición, aunque
necesaria, no es suficiente para que funcione rápidamente el
rearranque «al vuelo» de los motores
que todavía están girando. En efecto, aunque el acoplamiento se haga
controladamente y cumpla la inecuación citada, todos los motores tienen una
velocidad inferior a su velocidad nominal y absorben por tanto una intensidad
superior a su corriente nominal.
Para favorecer el éxito del
rearranque «al vuelo» de los motores durante una conmutación rápida, es necesario
que:
· la velocidad
que tengan los motores, en el instante de volver a alimentarlos, sea lo más
elevada posible. Esto depende de:
o
la duración
del corte de alimentación,
o
la inercia
de las masas giratorias,
o
el par
resistente durante el rearranque,
· el valor de
la caída de tensión de la red de alimentación ha de ser pequeña. Esto depende
de:
o
la
impedancia de las canalizaciones eléctricas,
o
la intensidad
absorbida por los motores,
o
el número de
motores a rearrancar,
· el valor del
par motor durante el tiempo de rearranque ha de ser superior (cuanto más mejor)
al par resistente.
El par motor es función de:
o el valor
nominal del par motor con tensión nominal,
o
la situación
del par en el margen de velocidad comprendido entre la velocidad en la que se
efectúa el arranque y la velocidad nominal,
o
la tensión
aplicada a los bornes del motor.
Hay que tener presente que si el deslizamiento de
los motores es importante en el momento de la realimentación, durante todo el
tiempo de rearranque la intensidad absorbida por los motores es constante y
próxima, en una primera aproximación, a la intensidad de arranque (la curva de
intensidad absorbida por un motor asíncrono en función de su velocidad de
rotación es relativamente plana).
Esquema del sistema de conmutación rápida en la
figura 11.

Figura 11
Cuadro
resumen:

FUENTE:
Schneider Electric: Conmutación automática de fuentes
en las redes AT y BT (Georges THOMASSET)
No hay comentarios:
Publicar un comentario