

La característica Par-Velocidad del motor de inducción es
muy rígida lo que hace que estos motores se utilicen principalmente como
motores de velocidad prácticamente constante.
En aquellas aplicaciones donde se requiere un control
preciso de la velocidad se prefieren motores c.c.
Sin embargo, hoy en día gracias a la incorporación de la
electrónica de potencia puede controlarse la velocidad de los motores
asíncronos y sacar partido al menor coste y bajo mantenimiento de estos
motores.
La velocidad de giro en un motor asíncrono se calcula
como:

Expresión que indica los sistemas de variación de la
velocidad del motor:
1. Cambio del
número de polos (conexión Dahlander).
2. Control de la
velocidad variando la frecuencia de la alimentación.
3. Control por
modificación del voltaje de línea.
4. Control por
introducción de resistencias en el rotor.
Variación del
número de polos (conexión Dahlander)
En qué consiste
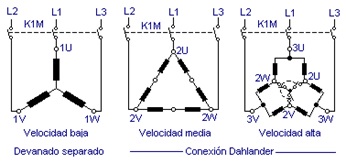
Algunos motores se fabrican con varios devanados
estatóricos separados cuyas combinaciones permiten obtener diferentes
velocidades de giro. Por lo general el devanado estatórico se forma con seis
bobinas combinables externamente (mediante un conmutador) en serie, paralelo o
una combinación especial conocida como Dahlander. De esta forma se pueden
obtener tres velocidades de giro para el motor.
·
Motor de dos
velocidades con dos devanados separados:

·
Motor de dos
velocidades en conexión Dahlander

·
Motor de tres
velocidades
Control de la frecuencia de alimentación
En qué consiste
En variar la frecuencia eléctrica de las corrientes que
se aplican al estátor. De esta forma se varía la velocidad síncrona de los
campos giratorios y por tanto la velocidad mecánica del rotor. En la actualidad
es el sistema más utilizado.
Margen de regulación
Con este sistema puede regularse la velocidad de un motor
de inducción en una franja que va desde un 5% hasta cerca del doble de la
velocidad síncrona nominal (velocidad base).
Reducir la velocidad
La regulación se realiza disminuyendo la frecuencia y la
tensión de alimentación al mismo tiempo. Con esto asegura que el circuito
magnético del motor no se sature.

Aumentar la velocidad
Se aumenta la frecuencia y la tensión se mantiene
constante a su valor nominal.
En estas circunstancias no se produce saturación del
circuito magnético, pues el flujo magnético disminuye con la frecuencia y anula
la posibilidad de saturación.

Forma de regular la
frecuencia
La regulación de la frecuencia
se realiza con variadores de frecuencia de estado sólido.

Ejemplos de variadores de
frecuencia comercial

Fotografías relacionadas con
la tabla:
1ª Foto:

2ª Foto:

3ª Foto:

4ª Foto:

5ª Foto:

Control por variación de la tensión de línea
En qué consiste
Como el par motor depende de
la tensión aplicada al cuadrado. Si se reduce la tensión, y por tanto el par
inducido, lo que ocurrirá es que el deslizamiento del punto de trabajo será
mayor y por consiguiente la velocidad se reduce.
Margen de regulación
La regulación se limita al
punto en que el par resistente corta a la curva del par motor en su máximo, ya
que una reducción mayor de la tensión provocaría entrar en la zona inestable
del motor y por consiguiente que el motor se parase.
Uso
Suele usarse en motores
pequeños para impulsar ventiladores (cargas de tipo cuadrático). No es un buen
método para usarlo en aplicaciones precisas.
Variadores de tensión

Control por introducción de residencias en el rotor
Sólo puede utilizarse en
motores con rotor devanado, donde se tiene accesible el devanado rotórico. Es
un método que sirve al mismo tiempo como método de arranque y también como
regulador de velocidad.

Gráfica:

POSTS RELACIONADOS:
Soluciones electrónicas para
el control y mando de motores de corriente alterna
Incidencias en los motores
alimentados por convertidores de frecuencia.
Descripción constructiva de
los motores asíncronos
Principios de funcionamiento
de los motores asíncronos
No hay comentarios:
Publicar un comentario